Flexibel, sicher und nahezu 100% verfügbar – 4am Robotics präsentiert auf der LogiMAT 2023 sein...
-1.png?width=950&name=SCIO%20Website%20Featurebild%201910x1000%20(2)-1.png)
Der neue World Robotics Report der IFR International Federation of Robotics zeigt ein Allzeithoch von 520.000 neuen Industrierobotern, die 2021 in Fabriken auf der ganzen Welt installiert wurden. Das entspricht einer Wachstumsrate von 31 % im Vergleich zum Vorjahr. Die Nachfrage nach automatisiertem Warentransport in der Intralogistik hat wesentlich zu diesem starken Wachstum beigetragen.
Autonome mobile Roboter (AMR) kommissionieren, transportieren und sortieren Artikel in Produktionshallen und Warenlager ohne manuellen Eingriff – sie sind der Schlüssel zur Potentialentfaltung der integrierten Smart Factorys und stellen die Verbindung von Logistik- und Produktionsprozessen sicher. Die enorme Nachfrage nach AMRs beruht auf einer Reihe von Vorteilen wie z. B. die Vermeidung von Produktschäden, die Reduzierung von Arbeitskosten, die Steigerung der Produktivität und die Automatisierung von Prozessen. Große Unternehmen in verschiedenen Branchen und Bereichen, darunter die Automobilindustrie, das Transportwesen sowie die Lebensmittel- und Getränkeindustrie, haben AMRs bereits im Einsatz.
Doch wohin geht die Reise? Was sind die AMR-Trends und aktuelle Herausforderungen für den nächsten großen Schritt in der mobilen Robotik? Wir haben unsere AMR-Experten von 4am Robotics gefragt, die seit 2016 unsere heterogene AMR-Flotte entwickeln. Sie geben Einblicke in die Entwicklungsbereiche.
1. Sensoren
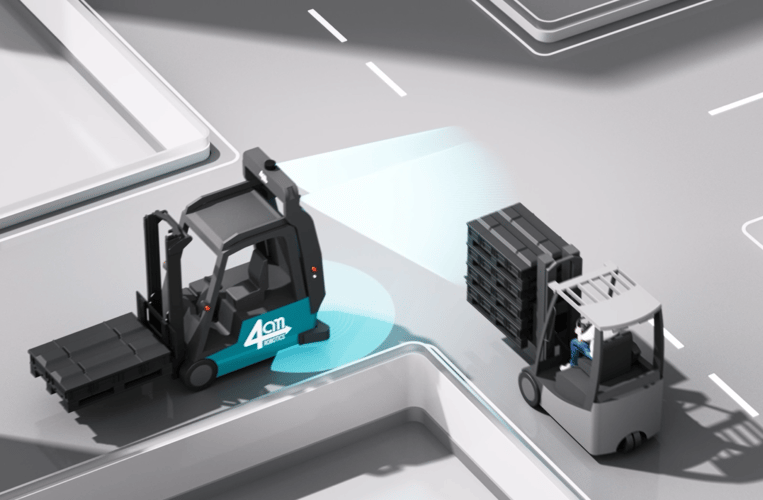
Können autonome mobile Roboter sehen, wohin sie fahren? Entscheidend hierfür ist die Sensortechnik.
Ein autonomes System muss Informationen über seine Umgebung sammeln können, um sich zurechtzufinden. Aus diesem Grund sind unsere Routenzüge, Stapler und mobilen Cobots mit Multisensorsystemen ausgestattet.
Einige Beispiele für gängige Sensoren sind:
- Ultraschallsensoren für die aktive Ortung
- Lidar-Sensoren zur Erkennung und Lokalisierung
- GPS-Sensoren für die Lokalisierung
- Kameratechnik zur Objekterkennung
- Gyroskope für eine bessere Orientierung
...und viele mehr!
Aber wie kann man diese enorme Menge an Informationen filtern? Hier kommt intelligente Sensorsoftware ins Spiel! Mit ausgefeilten Algorithmen und künstlicher Intelligenz werden AMRs immer besser darin, Stimuli zu interpretieren und sinnvolle Informationen zu generieren, auf die das System reagieren kann.
2. Lokalisierung
Woher wissen autonome mobile Roboter, wo sie sich befinden? Die GPS-Technologie reicht für eine präzise Positionsbestimmung nicht aus: Sie gewährleistet nur eine Genauigkeit von einigen Metern und das Signal wird zusätzlich durch Fabrikwände geschwächt.
Wie schaffen es also AMRs, zu wissen wo sie sich befinden?
Die Forschung zur Lokalisierung von mobilen Robotern in industriellen Umgebungen hat in den letzten Jahren stark zugenommen. Inzwischen gibt es mehrere Lösungen, mit denen AMRs ihre Position bestimmen können.
Eine davon ist das Erstellen einer virtuellen Karte und Lokalisieren durch konturbasierte Navigation 🗺️📍.
Die Entwickler erstellen eine detaillierte Karte des Geländes. Während die mobilen Roboter durch die Fabriken fahren, überprüfen Lasersensoren parallel ständig ihre Positionen auf dieser Karte🎆.
Aber was passiert, wenn man Dinge von A nach B bewegen will? Wie können mehrere AMR-Flotten auf einer einzigen Karte miteinander interagieren?
3. Autonome Navigation
Stellen Sie sich vor, Sie sind ein mobiler Roboter in einer industriellen Umgebung! 🤖
Könnten Sie alle Navigationsherausforderungen meistern?
Autonome mobile Roboter müssen ihre Routen planen und auf unvorhergesehene Ereignisse reagieren!
Sie müssen in der Lage sein:
- Hindernissen auszuweichen
- enge Korridore zu durchqueren
- den Verkehrsfluss zu optimieren
- bei unklaren Situationen eine Abstandsregelung einzuhalten
- an ihre Stationen anzudocken
Damit sie sich gut zurechtfinden können, sammeln AMRs Wissen über ihre Umgebung, und sind damit in der Lage, intelligente Entscheidungen zu treffen! Wie könnten sie noch bessere Entscheidungen treffen?
4. Traffic management
Roboter trifft auf Hindernis ➡️ anhalten oder ausweichen ❌
Roboter begegnet Mensch ➡️ anhalten oder ausweichen❌
Roboter trifft Roboter ➡️ "Wer geht zuerst?"🤔❓
Um eine Antwort auf diese Frage zu finden, müssen autonome mobile Roboter miteinander verknüpft werden.
Damit autonome Systeme in industriellen Umgebungen fahren können, muss der Verkehr aktiv gesteuert werden.
Die Verkehrsmanagementsteuerung (TMC) legt fest, welche Regeln an Entscheidungspunkten im Verkehrsfluss wirksam werden. Es gibt zwei Möglichkeiten, TMC anzugehen:
- Beim zentralen Verkehrsmanagement trifft ein zentrales System die Entscheidungen für die Fahrzeuge (z. B. ein übergeordnetes Steuerungssystem).
- Beim dezentralen Verkehrsmanagement kommunizieren AMRs mit dezentralen Systemen an Entscheidungspunkten, um die Freigabe zu erhalten. (z.B. SPS)
Dezentrales Verkehrsmanagement bietet große Flexibilität und ist daher eine hervorragende Option für intelligente Fabriken!
5. Objekt-Handling/Manipulation
Verbessern wir die Manipulation! 😈
In der Robotik ist ein Manipulator ein Gerät, das eine physische Interaktion mit der Umgebung ermöglicht. Er besteht in der Regel aus einer Reihe von Gelenken und einem Endeffektor oder Greifer.
Manipulatoren sind oft so konstruiert, dass sie den menschlichen Arbeitsbereich nachahmen und so ähnliche Aufgaben wie das Greifen und Bewegen von Objekten übernehmen können. 💪🦾
Dies ist jedoch nur bis zu einem gewissen Grad möglich und beschränkt sich meist auf genormte Kisten oder Behälter. Die Handhabung von Objekten, die sich in Größe, Gewicht, Form und Oberflächenstruktur unterscheiden, erfordert sehr geschickte Arbeitsbereiche und spezielle Greifer. Die kinematische Analyse und das Design der Endeffektoren sind hier entscheidend für eine erfolgreiche Manipulation.
4am Robotics entwickelt derzeit Greifer für das Be- und Entladen von...
- Montagegestellen
- Schleppzug-Anhängern
- Rollenförderer
...um nur einige zu nennen.
6. Umwelteinflüsse
Können autonome mobile Roboter im Regen fahren? ☔ Warum nicht?
Umwelteinflüsse stellen zahlreiche Herausforderungen für autonome Systeme dar. Wenn Sensoren und Laser durch Regen, Schnee oder Staub verdeckt werden, werden AMRs buchstäblich blind. 👀 ❓
Außerdem könnten die Roboter den Regen mit Hindernissen verwechseln.
Wie können die Sensoren den Unterschied zwischen starkem Regen und einer Mauer erkennen? Die Lösung liegt in der Bilderkennung. Diese muss sicherstellen, dass AMRs die Muster von Regen und Schnee verstehen!
Um zu verhindern, dass Scanner verschmutzt werden, haben wir ein Scanner-Reinigungssystem entwickelt, das einwandfreie Sicht von Sensoren gewährleistet.
7. Kapazitätsmanagement
🚨Warnung: Batterie schwach ⚡
Heterogene AMR-Flotten stellen große Herausforderungen für das Kapazitätsmanagement dar.
Autonome Routenzüge, Gabelstapler und Cobots müssen sich nahtlos in den täglichen Betrieb in intelligenten Fabriken einfügen. Ein großer Vorteil von AMRs ist, dass sie sehr flexibel sind.
Aber wann ist der richtige Zeitpunkt zum Aufladen?
Wie viele Docking-Stationen werden benötigt?
Wie gehen wir mit der Tatsache um, dass sich Routenzüge viel schneller bewegen können als Gabelstapler?
Es werden Systeme benötigt, um die Auslastung autonomer mobiler Roboter zu überwachen und zu steuern!
Es bedarf weiterer Forschung, um die Autonome Mobile Robotik weiterzuentwickeln. Handling von Objekten oder intelligente Lösungen wie AMRs besser mit Umwelteinflüssen umgehen können sind gefragt.